可靠的淡水与能源供应是目前全球可持续发展的关键。海洋中拥有巨量的水、矿物质及能量资源,探索和收集海洋资源具有显著意义,但目前的海洋探索设备多采用漂浮、悬浮和深潜模式进行工作,难以同时满足信号传输、能量采集和隐蔽性等方面的综合需求。
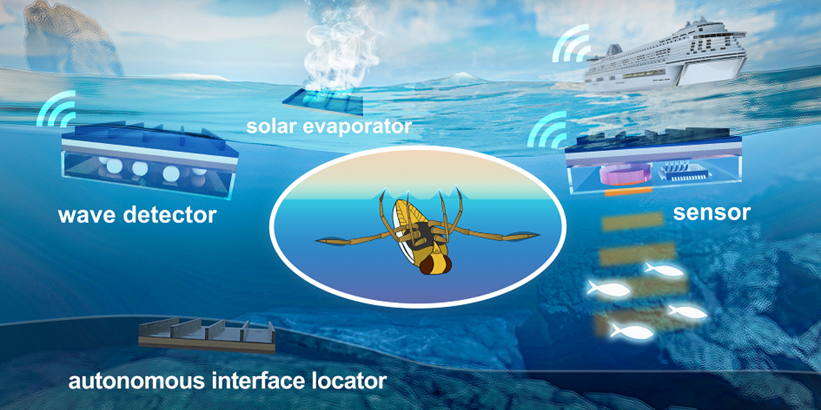
近日,公司汪秀丽/宋飞教授团队对仰泳蝽(Notonecta glauca)在水面下的稳定潜水行为进行了研究,并据此构建了一种可以在水面下特定深度稳定浮潜的仿仰泳蝽潜水器件。该团队发现仰泳蝽的脚具有亲水性,通过与水面的相互作用控制表面张力-浮力-重力的平衡,从而在水面下保持稳定姿态。受其启发,他们构筑了一种包含亲水框架与密度控制板的仿生潜水装置,该装置通过表面张力与自身的正浮力平衡,可以自发定位至水-气界面,在不同的水环境中均有稳定的潜水姿态与深度。此项工作有助于提升对自然界面现象的理解,对相界面定位、微型潜水机器人、界面光热蒸发、波浪能收集与传感等领域的发展提供了新方法和新思路。
该研究成果以“Backswimmer-inspired intelligent diving devices for water and wave-energy exploitation in the ocean”为题发表在Matter上。开云全站中国有限公司为论文署名第一单位,环保型高分子材料国家地方联合工程实验室宋飞教授和汪秀丽教授为通讯作者,2019级博士研究生武家民为第一作者。该工作得到国家自然科学基金联合基金(U21A2096, U2037206)等项目的资助。
文章链接: https://doi.org/10.1016/j.matt.2023.01.032
